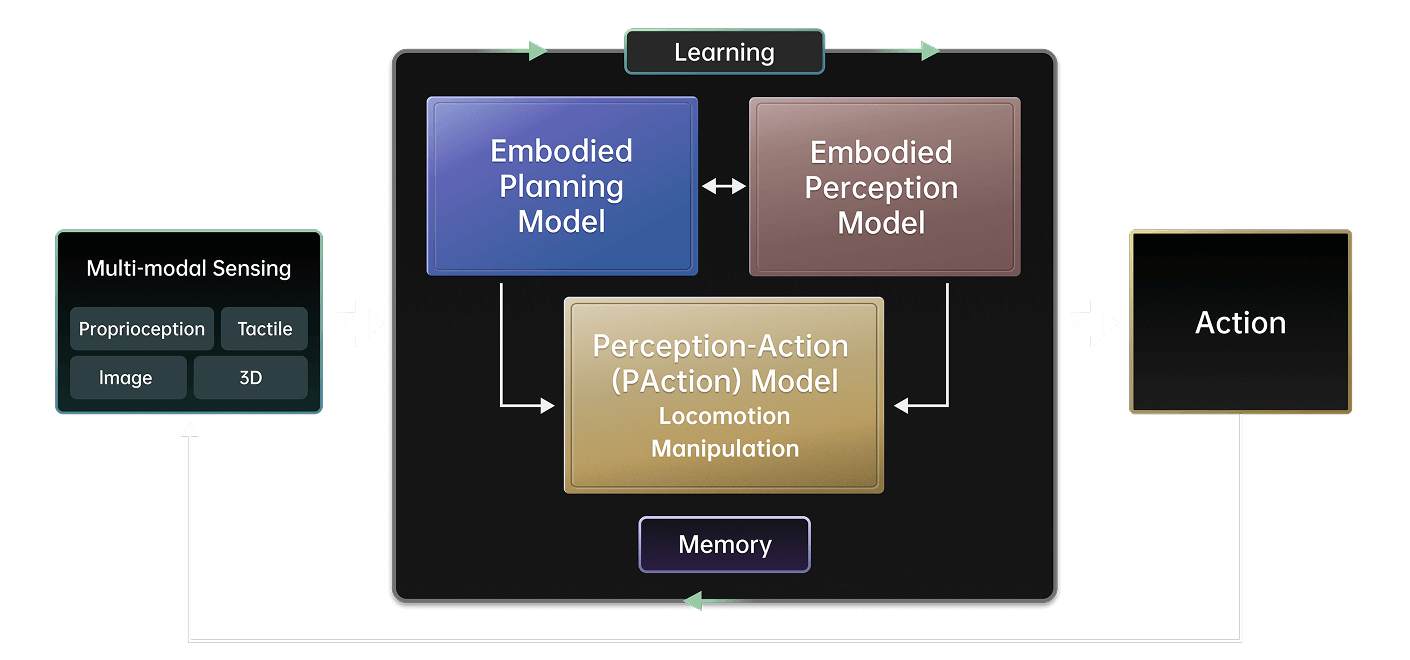
规划大模型

*该视频涉及模型能力:多模态感知模型、规划大模型
规划大模型作为机器人的“大脑”,具备自我认知能力,通过与人类自由沟通、拆解任务、调用工具、查询知识库,和在执行中的自我反思,最终完成长程复杂任务,并可为特定领域提供角色问答服务。
多模态感知模型

*该视频涉及模型能力:多模态感知模型、规划大模型
该模型可实时整合环境感知数据,构建语义丰富、空间关系精确的三维层级地图。支持自然语言输入输出,实现多场景下的高效信息检索,助力机器人精准完成任务规划与环境交互。
感知行动联合大模型-操作
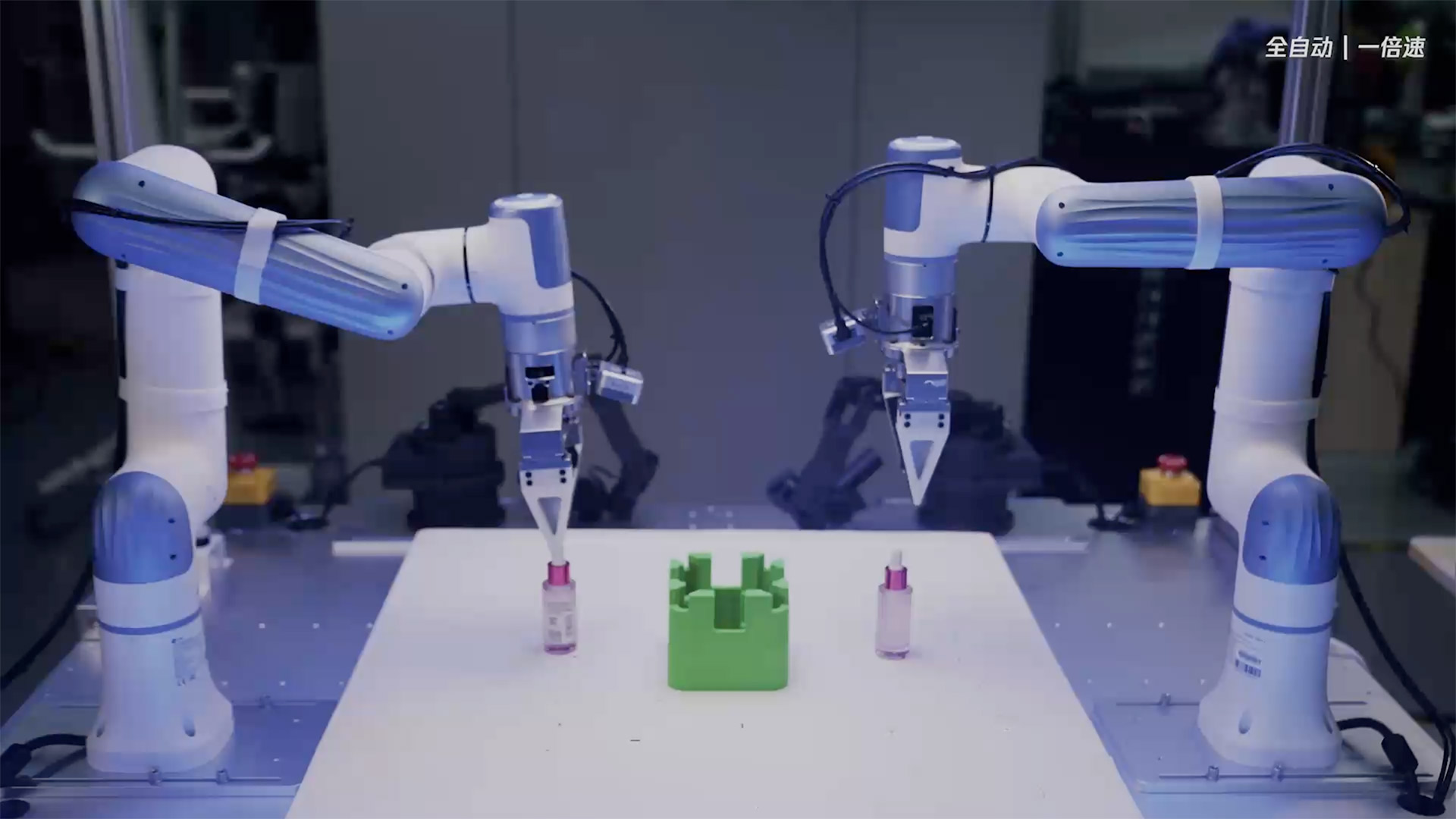
该模型结合快慢系统思考与时空物理感知,有效赋能多类型末端执行器(灵巧手、夹爪)在复杂场景下对多样物体的操作能力。

感知行动联合大模型-运动

针对人形机器人训练得到的模型可实时感知机器人本体信息、环境地形信息并作出及时响应,控制各关节协调运动,进而控制机器人灵活移动、灵敏运动。